Ratchet Effect and Nonlinear Transport for Particles on Random Substrates with Crossed ac Drives
C. Reichhardt and C.J. Olson Reichhardt
Center for Nonlinear Studies and Theoretical
Division,
Los Alamos National Laboratory, Los Alamos, New Mexico 87545
(Received 12 September 2005; published 12 January 2006)
We show in simulations that overdamped interacting
particles in two dimensions with a
randomly disordered substrate can exhibit
novel nonequilibrium transport phenomena including a
transverse ratchet effect, where
a combined dc drive and circular ac drive produce
a drift velocity
in the direction transverse to the applied dc drive.
The random disorder does not
break any global symmetry; however, in two dimensions,
symmetry breaking occurs due to the chirality of the circular drive.
In addition to inducing the transverse
ratchet effect, increasing the ac amplitude also strongly
affects the longitudinal velocity response and can produce
what we term an overshoot effect where the
longitudinal dc velocity is higher in the presence of the ac drive than
it would be for a dc drive alone.
We also find a dynamical reordering transition upon
increasing the ac amplitude.
In the absence of a dc drive, it is possible to
obtain a ratchet effect when
the combined ac drives produce particle orbits that break a
reflection symmetry.
In this case, as the
ac amplitude increases, current reversals can occur.
These effects may be observable
for vortices in type II superconductors as well as for colloids interacting
with random substrates.
I. INTRODUCTION II. SIMULATION III. CIRCULAR AC DRIVES AND TRANSVERSE RECTIFICATION A. Transverse and Longitudinal Velocity-Force Characteristics B. Dynamic Reordering with Circular ac Drives C. Transverse Ratchet and Overshoot Effect D. Effects of Disorder Strength, Particle Density, and
Temperature E. Effects of Varied Frequency and dc drive IV. RATCHET EFFECTS WITHOUT DC DRIVES V. SUMMARY References
There has been growing interest
in studying nonequilibrium transport of particles
on asymmetric substrates in which a dc flow of particles
can arise from the application of an ac drive or by flashing
the substrate on and off periodically [1].
This rectification
phenomena is often called a ratchet effect and has been studied
in the context of molecular motors [2], colloidal
matter [3], transport of atoms in
optical traps [4], granular matter [5],
electron transport in asymmetric geometries [6],
vortex transport and manipulation in type-II superconductors
[7,8,9,10,11,12],
and transport in Josephson junctions [13,14].
In most of these systems
the dc transport arises due to
the symmetry breaking caused by an
imposed one-dimensional asymmetric substrate, such as an asymmetric sawtooth
potential.
In higher dimensions, there are a larger number of possible ways in which
symmetry can be broken, so it is possible to induce ratchet effects
even when the
substrate is symmetric.
Recently it was shown that a driven overdamped
particle moving in a two-dimensional periodic substrate can exhibit
a transverse ratchet effect when driven with both a dc and a circular
ac drive [15].
In this case, the chirality of the ac drive breaks a symmetry
and the dc drive breaks a reflection symmetry, so that the combined
effect is to induce an additional dc particle
current in the direction
perpendicular to the applied external dc drive.
Due to the periodicity of the substrate and the periodicity of the ac driving,
a series of phase locking steps appear in both the
longitudinal velocity and the transverse velocity.
Even more complicated transport phenomena occur when the ac drive
is not circular but elliptical [16].
In this case it is possible to
observe a phenomenon called absolute transverse mobility, where the
particle moves only perpendicular to an applied dc drive.
Recently, a rich variety of ratchet dynamics were shown to occur for
atoms driven over a two-dimensional substrate with crossed or biharmonic
ac drives [17].
It has also been shown that a ratchet effect can be produced
even in the absence of a dc drive
for an overdamped particle in
a two-dimensional periodic potential when the crossed ac drives
produce a particle orbit that breaks a spatial
reflection symmetry [16].
In this case a series of phase locked regions appear as a function
of ac amplitude. In all these cases the substrate is periodic
and the
symmetry breaking required to produce the ratchet effect arises from the
ac drives. An open question is whether a net dc current
or ratchet effect can occur for driven particles
on random substrates when subjected to a circular ac drive.
Large scale vorticity patterns were
observed in simulations of particles interacting
with random substrates
when an ac drive was applied in only one direction [18].
The large scale flow arises since random substrates can cause a local
symmetry breaking, giving rise to a local ratchet effect. There is no
net global ratchet effect since the
symmetry is restored on average at large length scales.
These results suggest that ratchet effects should be
possible in dimensions higher
than one even when the substrate is random.
A ratchet effect that occurs on random substrates
could be of great practical
importance since many systems in which applications for a ratchet effect have
been proposed contain intrinsic random disorder. If a ratchet effect
could be produced directly from the random disorder,
additional fabrication of structured substrates would
not be needed.
One example of such a system is vortices in type II superconductors,
where random defects act as pinning sites.
Ratchets previously proposed for this system
have all included periodic substrates of
some form [7,8,9,10,11,12];
however, the random substrate ratchet effect we study here
could be achievable experimentally without nanostructuring
the superconducting surface.
In this work we show that several types of ratchet and nonequilibrium transport
phenomena can occur for particles interacting with a two-dimensional
random substrates with crossed ac driving forces. In the
absence of the disordered
substrate there is no ratchet effect. For the case where there is a circular
ac drive and an applied dc drive, a transverse ratchet effect can occur
in which
a net dc drift arises in the direction perpendicular to the
dc drive. If the ac drives are chosen such that
the particles undergo spatially asymmetric
orbits, directed transport can occur even the absence of the applied dc drive.
It is also possible to have flux reversals as a function of ac amplitude.
In the absence of disorder, the
multiple ac drives do not produce a ratchet effect.
We specifically demonstrate these ratchet effects for
vortices in type-II superconductors
and colloidal particles confined to two dimensions.
We consider an assembly of Nv
overdamped interacting particles in two dimensions, and
impose periodic boundary conditions
in the x and y directions.
The equation of motion for an individual particle
i is
ηvi = fi = fiint+fip+fdc+fac +fiT
(1)
where the damping constant
η is set to unity.
The equation of motion is integrated according to the leap-frog method with a
normalized time step dt = 0.001.
The interaction force from the other particles is
fiint = −∑Nvj ≠ i∇iU(rij),
where rij is the distance between particles i and j.
We consider two forms of particle-particle interactions.
Vortices in a thin film type II superconductor have a repulsive
interaction with U(rij) = −ln(rij) which gives a long
range repulsive force 1/rij. We have previously simulated vortices
in periodic arrays of pinning sites using this interaction
and a similar equation of motion. In order to treat
the long-range interactions efficiently,
we employ a fast summation technique [19].
Additionally we have considered a short range
repulsive Yukawa interaction
with inverse screening length κ,
U(rij) = exp(−κrij)/rij,
which is appropriate for colloidal particles.
In this case, we assume that we are working in the strongly charged,
low volume fraction limit, so that hydrodynamic interactions can
be neglected.
The force from the random substrate is modeled
as Np randomly placed attractive parabolic wells with
fpi = −
Np ∑ k=1
(fp/rp) |ri − rk(p)| Θ(rp − |ri − rk(p)|)
^
r
(p) ik
(2)
where Θ is the Heaviside step function, rk(p) is
the location of pinning site k, fp is the maximum pinning force,
rp is the pinning site radius and
∧rik(p) = (ri − rk(p))/|ri − rk(p)|.
The force from the temperature fiT
is modeled as random Langevin kicks with the properties
〈fTi(t)〉 = 0
and 〈fTi(t)fTj(t′)〉 = 2ηkBTδijδ(t −t′).
Except where noted, the results are obtained at T=0.
In some cases we apply a dc force, fdc, which is modeled as a
uniform force on all the particles in the x direction.
In this work we increase the
dc force in small increments, and we have checked that the force increase
is small enough that transient effects are negligible.
The ac drive force is
fac = f(t)
^
x
+ g(t)
^
y
.
(3)
Here f(t) and g(t) are oscillating functions with
〈f(t)〉τ = 0 and
〈g(t)〉τ = 0.0 over a period τ.
In the first part of this work we will consider the
circular drive
case of f(t) = Asin(ωt) and g(t) = Acos(ωt).
We measure the particle trajectories and velocities
in the longitudinal
〈Vx〉 = (1/Nv)〈∑iNv∧x·vi〉 and
transverse direction
〈Vy〉 = (1/Nv)〈∑iNv∧y·vi〉.
We average over several hundred periods of the ac drive in
order to obtain a steady state average.
III. CIRCULAR AC DRIVES AND TRANSVERSE RECTIFICATION
A. Transverse and Longitudinal Velocity-Force Characteristics
Figure 1:
Particles (black dots) and trajectories (black lines) for a fixed
period of time for a system with random pinning and a
circular ac drive with fixed frequency ω = 0.001 and increasing
amplitude A. (a) A = 0.0, (b) A = 0.5, (c) A = 0.8, and
(d) A = 1.2.
We first consider the case of a circular ac drive
and no dc drive.
In Fig. 1 we illustrate the particle motion
over a fixed period of time for a system with
Np = 250, Nv = 280, fp=3.5, T = 0.0,
fdc=0,
fixed frequency ω = 0.001, and an increasing ac amplitude A.
In Fig. 1(a), A = 0.0 and all the particles are stationary. In Fig. 1(b),
at A = 0.5, a portion of the particles are pinned and do
not move with the ac drive; however, several particles are now
mobile and follow closed paths. In the absence of other particles the
paths would be circular, but due to the repulsion of the neighboring
trapped particles, the paths are strongly distorted from circular
shapes.
In general, at low ac amplitude some of the particles move in
closed paths but
there is no long time particle diffusion.
If there are many more particles than
pinning sites, Nv >> Np,
it is possible for meandering paths that
change with time to form, permitting some particles to diffuse throughout the
entire sample over long time scales. When the number of particles is close
to or less than the number of pinning sites,
Nv <~Np,
similar meandering paths can only form at
higher ac amplitudes
when pinning and repinning of particles at the pinning sites
becomes possible, as shown
in Fig. 1(c) for A = 0.8. As the
ac amplitude is further increased, more of the particles become mobile
and eventually all the particles depin. In Fig. 1(d) we show
the case for A = 1.2 where large portions of the particles are depinned
and the channel structures
in which motion is occurring change rapidly with time.
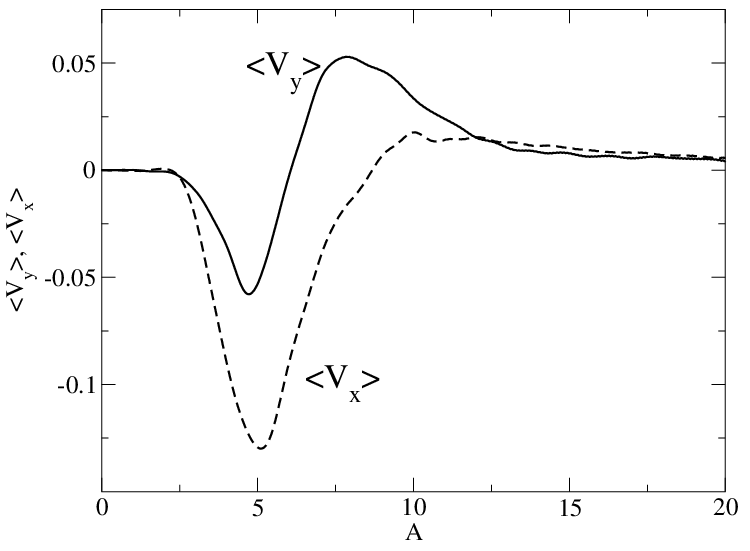
Figure 2:
The average velocity response in the (a) x and (b) y directions for
a system with
fp=3.5, a fixed dc drive of fdc = 1.0, and increasing
circular ac drive amplitude A.
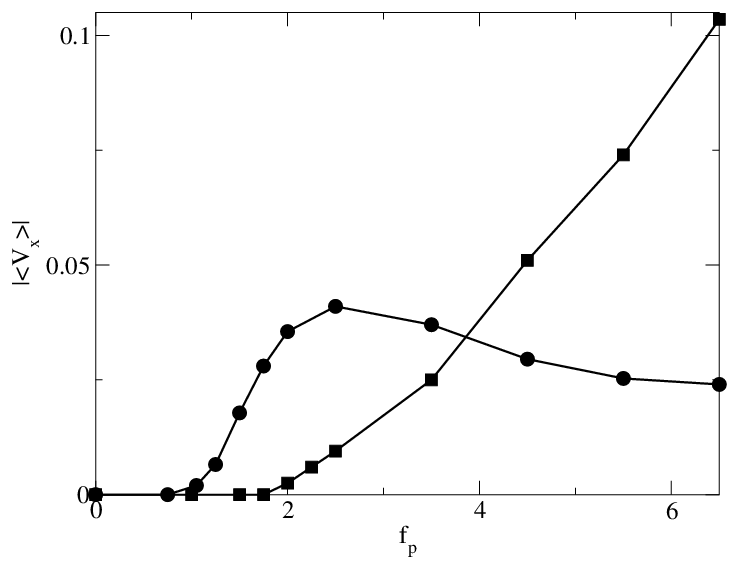
Figure 3:
A closeup of 〈Vx〉 vs A
for the system in Fig. 2(a) showing the
overshoot region where
〈Vx〉 > 1.0.
In the absence of a dc drive,
a purely circular ac drive does not
produce a net drift velocity, and
〈Vx〉 = 〈Vy〉 = 0.
If the system size is very small and finite
size effects become relevant, it is possible to
observe a small dc drift.
For the system sizes we consider here, these
finite size effects are eliminated.
In Fig. 2 we plot 〈Vx〉 and 〈Vy〉
vs A for the
same system in Fig. 1 with a fixed dc drive fdc=1.0 applied in the x
direction. In the absence of pinning,
a single particle subjected to this combination of drives
would move in the x-direction
with 〈Vx〉 = 1.0.
For A = 0, most of the particles are pinned,
〈Vx〉 = 0.1, and
〈Vy〉 = 0. For A < 0.58, there is little
change in 〈Vx〉 and
〈Vy〉, while for 0.58 < A < 2.0
the velocity in the x-direction
increases, indicating that more particles are depinning and
moving in the direction of the dc drive. Over this same range
of A,
〈Vy〉 drops below zero and develops an increasingly
negative value,
indicating that particles are drifting
in the negative y-direction
in spite of the fact that there
is no applied dc drive in the y direction.
The transverse velocity reaches a
maximum magnitude |〈Vy〉| = 0.09
near A=2.1 and then gradually returns to zero at A ∼ 5.
For A > 6 the longitudinal velocity saturates at
〈Vx〉 = 1.0 indicating that the pinning has been
washed out and the particles are moving at the same velocity as
they would in the absence of pinning.
For 2.6 < A < 6, in a range falling above the maximum of
|〈Vy〉| but below the saturation
of 〈Vx〉,
there is what we term an overshoot effect where the
longitudinal velocity
〈Vx〉 is greater than the
maximum possible velocity expected for the applied dc drive,
〈Vx〉 > 1.0.
In Fig. 3(a)
we show a blowup of this region where there is a peak value
of 〈Vx〉 = 1.12 at A=3.5, giving an excess velocity
of 0.12.
This implies that some of the energy from the x component of the ac drive
is being coupled into the particle motion during the positive x direction
half of the ac cycle, but an equivalent amount of energy is not
being removed during the negative x direction half of the
ac cycle, producing a net imbalance.
The random substrate plays an important role in this effect, as indicated
by the fact that 〈Vx〉 gradually drops back to
a saturation value of 1.0 as the ac drive amplitude is further increased
and washes out the effect of the pinning.
The transverse ratchet and the overshoot
effect can both be understood as arising from
the combination of the symmetry breaking from the circular drive and the
nonlinear features of the velocity-force curves
that appear when plasticity is induced as particles are driven over
a random substrate, as we will demonstrate in the following sections.
In general, for particles such as vortices or colloids
moving over strong random disorder
under the influence of a dc drive f, there
are three distinct dynamic regimes [20,21,22,23].
For low drives f,
all the particles are pinned, and there is a
threshold depinning force fc
that must be applied before motion begins.
As the driving is
increased further above depinning,
f >~fc, there is a plastic flow regime where
pinned and flowing particles coexist.
In this regime
the velocity vs force curves are non-linear and
can be fit to a power law form
V = (f − fc)β.
For elastic depinning, β = 2/3, but for the plastic depinning
that occurs for strongly disordered substrates,
β > 1.0 [9,25,26].
At even higher drives, a dynamical
reordering effect occurs in which the particles crystallize or
partially crystallize when
the longitudinal component of the pinning is effectively washed out.
Above this
transition, the velocity force curves are linear.
The reordered state can be a moving crystal or moving smectic state
[23].
When these three phases occur, the velocity force curves
have a distinct S-shape, and the concavity of the
velocity force curve changes from positive to negative somewhere
in the plastic flow regime as the plastic to moving crystal crossover
is approached.
In the crossover regime
that occurs above the change in concavity, β
drops from β > 1 to β = 1.0.
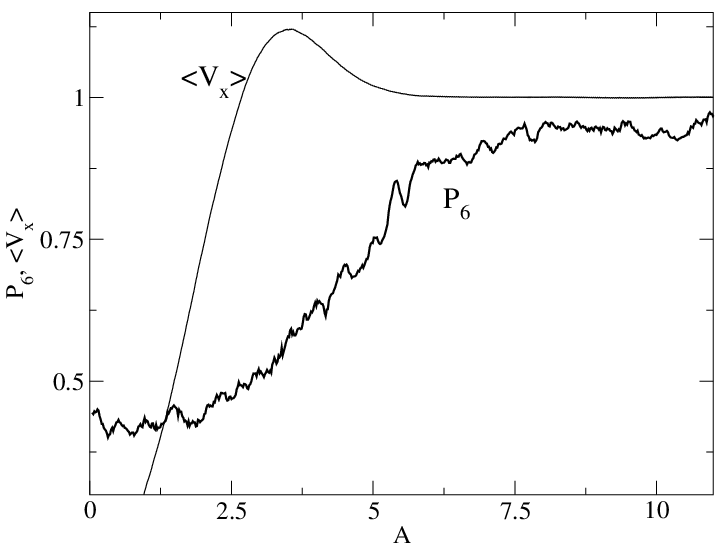
Figure 4:
The fraction of six-fold coordinated particles P6 vs A for the
same system in Fig. 2.
〈Vx〉 vs A is also plotted for direct comparison
to show that the overshoot effect is lost when the
lattice reorders.
If a single ac drive is applied in the x direction instead of a dc drive,
it is still possible to produce the three
dynamic regimes described above as a function of ac amplitude and frequency
since the transitions between the regimes are not hysteretic, and
the system will reorder into a moving smectic state [27].
In our system we apply a pair of ac drives to produce a circular ac drive,
rather than a single unidirectional ac drive, and we also add
a dc drive.
We find that a dynamical reordering
transition can still occur in this system, but that
the final reordered state is not
a moving smectic for small fdc
since the ac drive does not select a particular direction.
In Fig. 4 we plot the fraction of six-fold coordinated particles P6 vs
A for the same system shown in Figs. 2 and 3, and we also
superimpose 〈Vx〉 from Fig. 2(a) for a
direct comparison.
The quantity P6 is obtained
from a Delaunay triangulation of the system. If the entire lattice is
triangular, then P6 = 1.0.
For low A the system is strongly disordered, as indicated by the
fact that P6 ∼ 0.4.
As A is increased, P6 increases rapidly
toward one for A > 2.5, which also corresponds to the region in which
the overshoot effect of 〈Vx〉 occurs.
For high values of A > 6, the
system is reordered and P6 is close to one as the
system enters a moving crystal phase. We note that P6
never reaches one due to the boundary effects on
the algorithm we used to obtain the coordination
number.
When P6 saturates, the overshoot effect and
the transverse ratchet effect are both lost.
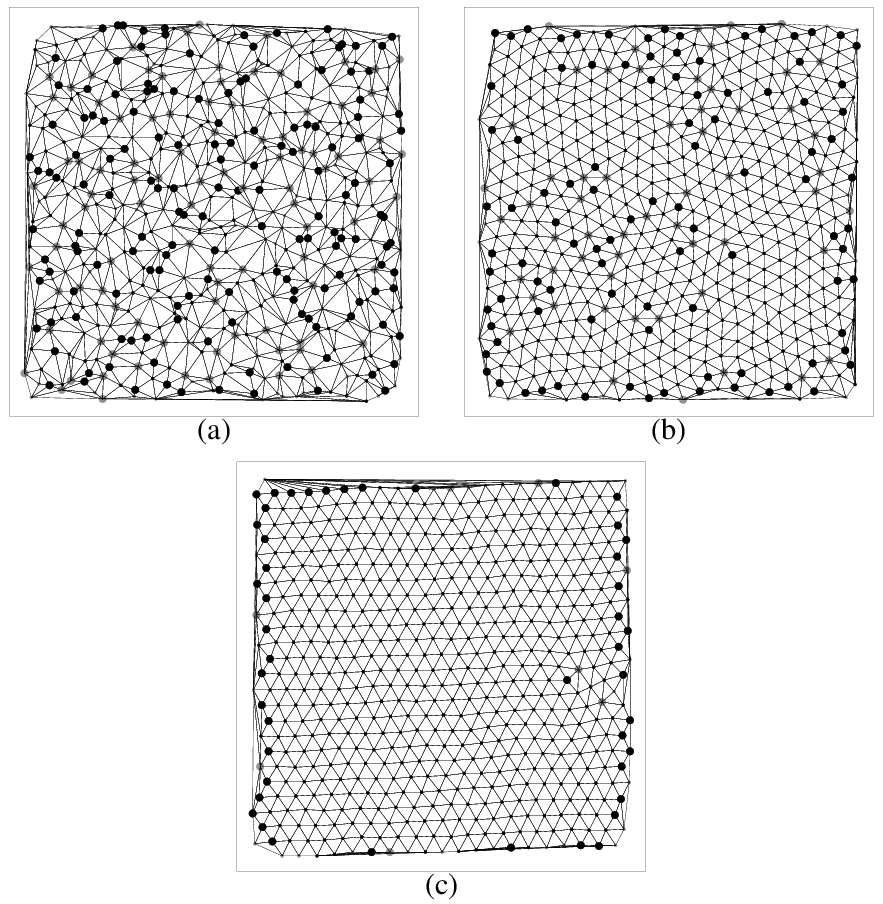
Figure 5:
The Delaunay triangulation of the particle positions
at one instant
for different values of A for the system in Fig. 4.
The large black dots indicate fivefold coordinated particles
and the lighter large dots indicate sevenfold coordinated particles.
(a) A = 0.5, (b) A = 2.5, and (c) A = 10.
In Fig. 5 we illustrate the Delaunay triangulations of the particles
at increasing values of A for the system in Fig. 4.
In Fig. 5(a) for A = 0.5, the system is strongly
disordered.
In Fig. 5(b) for A = 2.5, the system is more ordered
and contains regions of sixfold coordinated particles.
For A = 10, shown in Fig. 5(c), the system is almost
completely reordered into a triangular lattice
and only a small number of
dislocations are present.
We note that the lattice is not
well aligned with the direction of the dc drive,
but has its close-packed direction at an angle to the x axis.
The near alignment occurs due to the fact that a small dc drive is
being applied. When we perform the simulation with zero dc drive,
the reordering still occurs but the direction of the lattice alignment
is random in any given run.
This is in contrast with previous simulations
performed with dc drives [22] where
the reordered lattices formed moving channels that were
strongly aligned with the dc drive.
In the case of reordering induced by a purely dc drive, the dislocations
present at higher drives all have aligned Burgers vectors and the
system forms a smectic state
since the driving force has reduced the pinning only in the direction of
drive, but the pinning transverse to the driving direction still
remains effective [23].
In our ac driven system, the
one-dimensional channel structures of the smectic state
cannot form since the circular ac motion destroys the effectiveness of
the transverse pinning as well as of the longitudinal pinning. Thus we
find no moving smectic state.
Under the circular ac drive, each particle has a nonzero velocity
component in the positive y direction for half a period, and in the
negative y direction for the other half period. There is no dc force
applied in the y direction so these components are equal in magnitude.
For the velocity component in the x direction, during half the period
0 < t* < τ/2, where t*=tmod τ,
the ac and dc drives are in the same direction and the particles
move faster under the maximum force
fmax=fdc+A, while in the other half of the
period τ/2 < t* < τ,
the two
drives counteract each other and the particle moves
more slowly under the minimum force fmin=fdc−A.
If we consider the limit of small ac driving amplitude, where the system
is still within the nonlinear portion of the velocity-force response curve,
a portion of the particles have depinned but a portion remain pinned.
Under the drive we apply, the moving particles follow clockwise circles.
During an orbit in which a moving particle encircles a pinned particle,
the pinned particle exerts a repulsive force on the encircling particle.
For 0 < t* < τ/2, the moving particle passes the pinned particle in a
short period of time so the repulsive force has less time to deflect the
particle in the +y direction. On the other hand,
for τ/2 < t* < τ, the moving particle takes longer to pass
the pinned particle, so the average deflection in the −y direction is
larger.
As A increases from a small value, more particles become unpinned
and the average velocity in the −y direction increases.
When A is large enough that more than
half the particles are depinned, the −y ratcheting effect
starts to decrease since there are fewer pinned particles available to
deflect the paths of the moving particles.
The velocity should go as the product of the fraction of
moving particles nm and pinned particles np,
〈Vy〉 = nmnp = nm(1 − nm).
This gives a parabolic shape for 〈Vy〉,
which is similar to what is observed in Fig. 2(b),
and the peak should occur when nm = 1/2.
At the larger drives when all the particles are moving and the
velocity-force curve is no longer nonlinear,
the transverse ratcheting effect is lost. The maximum for
|〈Vy〉|
in Fig. 2 occurs at A = 2.0. If we take the approximation
that the unpinned particles move at the velocity of the applied dc drive,
then nm=0.5 would correspond to 〈Vx〉 = 0.5,
which occurs at A = 1.5, not far from the
maximum in
|〈Vy〉|. At high A when
all the particles are depinned, the transverse drift disappears.
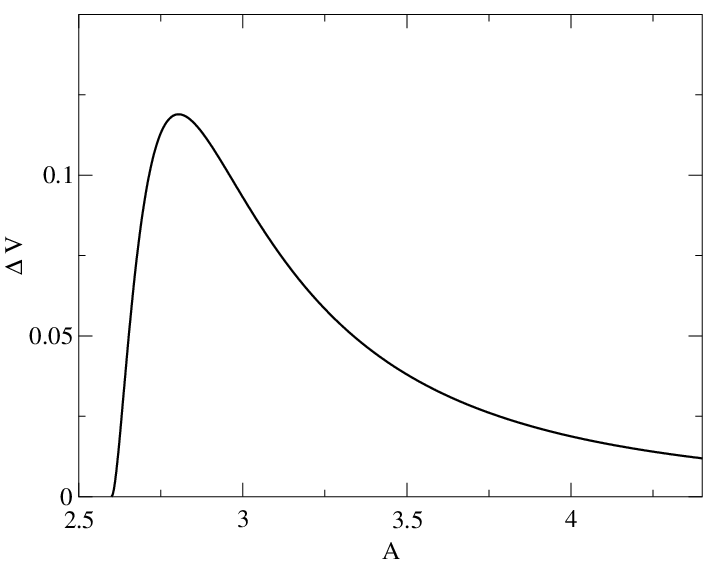
Figure 6:
Plot of the behavior of ∆V(A) vs A from the phenomenological form
∆V(A) = B[A(1 −(1/A)δ1) − A(1 − (1/A)δ2)]+C
for δ1 = 4.0, δ2 = 3.9, B = 19.8, and C = 1.6.
The overshoot effect can be understood as arising from
changes in the nonlinear velocity
force curve relations near the reordering transition. Well
below the reordering transition,
the velocity scales with the driving force as a power law
〈Vx〉 ∝ Aβ1,
where β1 > 1, but above the reordering
transition 〈Vx〉 scales linearly with the velocity.
As a result, near but below the reordering transition, the scaling relation
changes form and the scaling exponent may be slightly different,
giving 〈Vx〉 ∝ Aβ2,
with β2 → 1 as the reordering transition is approached.
For A near but below the reordering transition,
when the ac and dc forces sum to fmax in the positive x direction
during the interval 0 < t* < τ/2,
the velocity follows Aβ2.
During the other half of the cycle τ/2 < t* < τ, the particle motion
slows under fmin and the velocity follows Aβ1.
The difference during a full period is
∆Vx(A) ≈ Aβ1 − Aβ2.
In the high driving regime
where the velocity response is linear, β1 = β2 = 1.0, so
∆Vx = 0. Near the ordering transition,
β2 is very close to 1 since it is very close to the region where
the velocity force curve is linear.
In contrast, β1 > 1.0, so that Aβ2 < Aβ1.
As a result, there is a net positive contribution from the ac drive to the
dc force over each cycle,
giving rise to an average velocity 〈Vx〉 > 1,
higher than the velocity produced by a strictly dc drive.
We now make a very simple phenomenological assumption for the form
of the excess velocity:
∆V(A) = A(1 − (1/A)δ1) − A(1 − (1/A)δ2).
With this form, ∆V(A) = 0 for large A
when both exponents go to one.
We also assume that δ1
is larger than δ2 by a small amount, so that
the exponent on the τ/2 < t* < τ half of the cycle is
always smaller than that on the 0 < t* < τ/2 half of the cycle.
For all δ1,2 > 1 and A > 1,
∆V(A) shows a peak and a slow roll off to zero,
illustrated in
Fig. 6, which is
very similar to the behavior of the excess velocity seen in Fig. 3.
This suggests
that the overshoot velocity arises
due to the nonlinear form of the velocity force curves
near the dynamic reordering transition.
D. Effects of Disorder Strength,
Particle Density, and Temperature
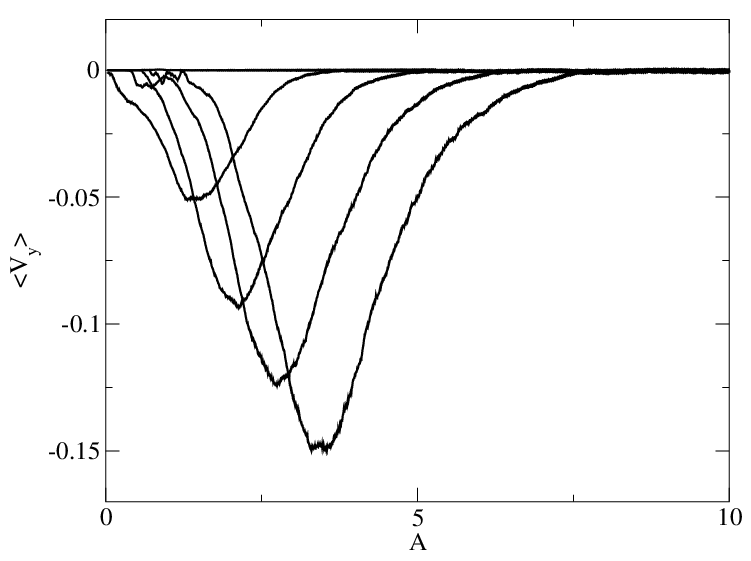
Figure 7:
Vy vs A for varied fp for the same system parameters as in Fig. 2.
From top minimum to bottom minimum, fp = 0.5
(flat line), 2.5, 3.5, 4.5, and 5.5.
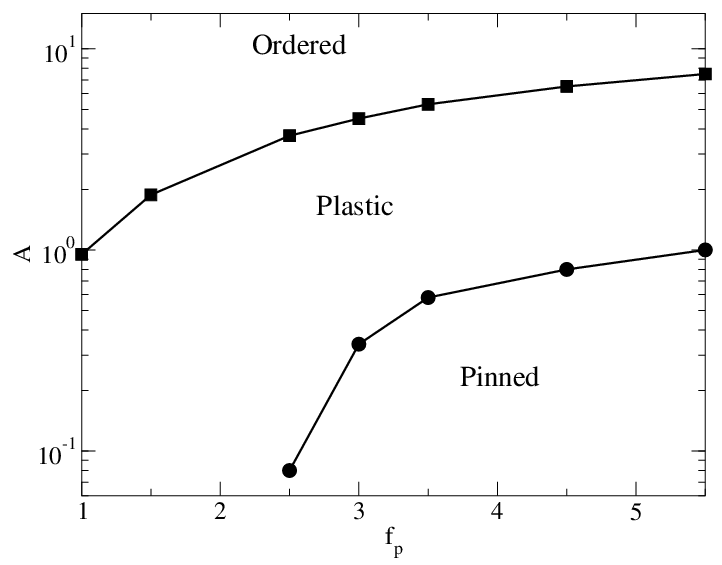
Figure 8: Dynamic phase diagram as a function of A and fp
showing the pinned regime,
plastic flow regime, and reordered regime. The reordered regime is
similar to that illustrated in Fig. 5(c).
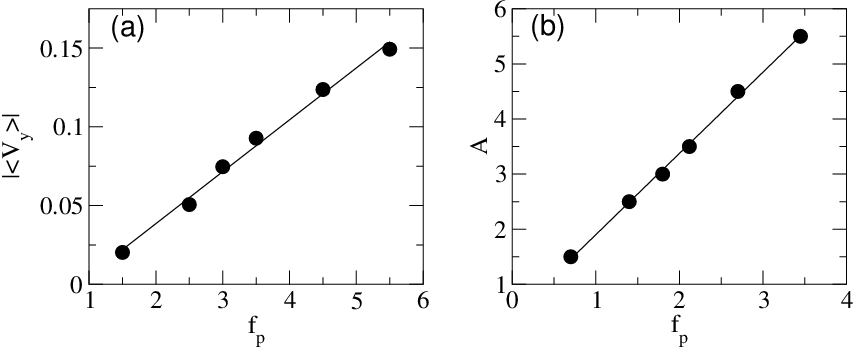
Figure 9:
(a) The maximum value of |〈Vy〉| vs
fp for the system in Fig. 7.
The solid line is a linear fit.
(b) The value of A at which the maximum
in |〈Vy〉| occurs as a function of fp
for the system in Fig. 7. The solid line is a linear fit.
We next examine how the transverse ratchet effect evolves as a function
of disorder strength.
In Fig. 7 we plot 〈Vy〉
vs A for fp = 0.5, 2.5, 3.5, 4.5, and 5.5.
For the weak disorder fp=0.5, we do not observe any transverse ratcheting,
as indicated by the flat line in Fig. 7.
As the disorder strength
increases, the maximum value of |〈Vy〉| increases
and the peak value shifts to higher
A. The reordering transition at high A also moves out to larger A.
A similar trend appears in the longitudinal velocities
〈Vx〉 with the overshoot phenomenon
showing the same behavior as in Fig. 2(a). In Fig. 8 we map out the
dynamic phase diagram for A vs fp. For high A the system forms an
ordered phase similar to that illustrated in Fig. 5(c). For low A and
high fp the system is in the pinned phase.
We note that, due to the constant applied fd=1, if
fp < fd, the system passes directly into a moving phase
and is never pinned.
The intermediate regime
is the plastic flow phase where there is a finite transverse velocity.
As fp is lowered, the onset of the ordered phase drops to lower values
of A. For fp < 1.0 the pinning is weak enough that large portions
of the lattice start to crystallize and the transverse ratcheting effect
becomes very difficult to detect.
In Fig. 9(a) we show that the maximum value of
|〈Vy〉| increases
linearly with
the maximum pinning force and in Fig. 9(b) we show that
the value of A where the peak value in
|〈Vy〉| occurs also increases linearly with fp.
Figure 10:
(a) The maximum value of |〈Vy〉| vs
particle density n for a system with fp = 3.0.
(b) The dynamic phase diagram for A vs n.
The squares separate the pinned phase from
the plastic flow phase and
the solid circles separate the plastic flow phase from the
reordered moving phase.
(c) The maximum in |〈Vy〉|
vs system size L for a system with
fixed n = 0.4 and fp = 3.0.
(d) The maximum value of of |〈Vy〉| vs T for
a system with fixed n = 0.3 and fp = 3.0.
Next we consider the effects of changing the
particle density n. We fix both
the ratio of particles to pinning sites and the system size.
In this way, the effects of the particle-particle interactions can
be studied. The transverse ratchet arises due to the interaction between
the moving particles and the repulsive force from the pinned particles.
If the density of the system is lowered, the average velocity
〈Vy〉 of the transverse ratchet effect
should drop since the particles are further apart.
In Fig. 10(a) we plot the peak value for
|〈Vy〉| vs n for a system with fp = 3.0. For low
density, |〈Vy〉| is small and steadily increasing.
|〈Vy〉| reaches a peak near n = 0.4 and
then gradually decreases for higher n. This fall off
in |〈Vy〉| at larger n occurs because
the increasing strength of the particle-particle interactions
reduces the effectiveness of the pinning, and portions of the
lattice crystallize and become rigid at higher values of n.
In Fig. 9 it was shown that stronger pinning
increases the magnitude of the maximum value of
|〈Vy〉| for fixed particle density, highlighting the
central role that the pinning plays in the transverse ratchet effect.
Another measure of the reduced effective pinning at high densities
is shown in Fig. 10(b)
where we plot the dynamic phase diagram as a function of A and n
for the same system in Fig. 9.
The squares mark the separation between the pinned and plastic flow regimes,
and the circles separate the plastic flow from the ordered regime.
As n increases, the depinning threshold drops and the pinned phase
monotonically decreases in extent.
The value of A at which the
transition to the ordered phase occurs
is relatively constant as a function of n,
but shows a very small peak feature
similar to what is seen in Fig. 10(a).
This result indicates that the ratchet effect arises due to
the collective interactions between the particles, since when
the interactions dominate over the pinning, the
transverse ratcheting effect is reduced or destroyed.
We next consider finite size effects in a system where we set
n = 0.4, fp = 3.0, and fix the ratio of the number
of particles to the number of pinning sites.
We perform a series of simulations
for increasing system size L and plot the
maximum value of |〈Vy〉| vs L in Fig. 10(c).
We find only a slight decrease in |〈Vy〉| at small L,
and observe that |〈Vy〉| is constant at higher L.
This indicates that the transverse ratchet effect is not a finite
size effect and that the value of |〈Vy〉| is
determined by the relative density and strength of the pins.
Next we consider the effect of finite temperature.
In Fig. 10(d) we plot the maximum value of
|〈Vy〉| vs T for the same system in
Fig. 9(a) for n = 0.4. Here, we find that
|〈Vy〉| fits well to an exponential decay,
|〈Vy〉| ∝ exp(−αT). This
indicates an activated transport mechanism. In the plastic flow regime where
the transverse ratchet effect occurs, moving particles
circulate around pinned particles, but as
the temperature increases, the pinned particles become activated
out of the pinning sites and the ratchet effect is lost.
We also note that another test of the fact that the pinning density
and strength controls the effectiveness of the
transverse ratchet is to vary the number of particles while
holding the number of pinning
sites fixed. As the number of particles increases, the maximum in
|〈Vy〉| stays at roughly
the same value (not shown) since the number of pinned particles,
which controls the ratchet effect, remains constant.
Figure 11:
|〈Vy〉| vs ω for fixed A = 2.0, n = 0.4 and
fp = 3.0. The solid line is a fit to 1/ω.
In Fig. 11 we show the maximum value of |〈Vy〉|
vs frequency ω for fixed A = 2.0 with the same
parameters as in Fig. 10(a) for n = 0.4.
For low frequencies, |〈Vy〉| saturates to a constant
value. For the higher frequencies,
|〈Vy〉| decreases approximately as 1/ω. We note
that as the frequency increases, the effective radius of the
circular particle orbit decreases.
For increasing A and fixed ω,
the radius of the orbit increases,
and in Fig. 7 we found that |〈Vy〉|
increases linearly with A.
From these sets of simulations we find that the
effective transverse ratchet effect
as measured by the maximum value of
|〈Vy〉| goes as (A/ω)fpexp(−αT). Also, as
a function of n, the system shows a maximum
in |〈Vy〉|, indicating that there is an optimal value
of particle-particle interaction strength for the transverse ratchet
effect.
Figure 12:
(a) 〈Vy〉 vs fdc and (b) 〈Vx〉
vs fdc
for fp = 1.4, n = 0.4, and fixed A = 0.5.
We have also considered the case of fixed A and increasing fdc.
In general we find a similar transverse ratchet effect and dynamical reordered
regime at high fdc.
In this case, 〈Vx〉
monotonically increases and there is no overshoot effect.
In Fig. 12(a) we plot
〈Vy〉 vs fdc and in Fig. 12(b) we show
〈Vx〉 vs fdc for a system with fixed
fp = 1.5, A = 0.5, and n = 0.4.
For fdc > 2.0, the system reorders to a moving crystal. At low
drives there is some creep due to the application of the ac drive. As
fdc increases, more of the particles become depinned and can ratchet
so a peak in 〈Vy〉 occurs near
fdc = 0.9, while at high drives all particles are depinned
and 〈Vy〉 goes to zero.
There is an interesting second peak feature
in 〈Vy〉 at
low fdc. This occurs near what would be the
dc depinning threshold at A = 0.0.
For fp > 3.0 this second peak structure disappears.
Figure 13:
(a) Orbit for a system with a circular ac drive. (b) Orbit for a
system with
g(t)=cos(6ωt)∧y+[sin(4ωt)+sin(6ωt)]∧x, with ω = 0.001.
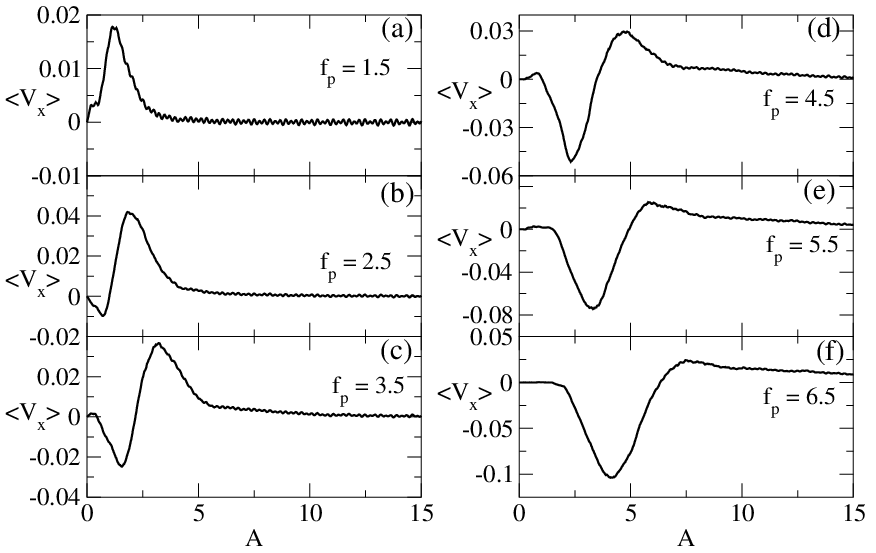
Figure 14:
〈Vx〉 vs A for a system driven with the ac drive
shown in Fig.13(b)
for fp = (a) 1.5, (b) 2.5, (c) 3.5, (d) 4.5, (e) 5.5, and
(f) 6.5.
Figure 15: The maximum
|〈Vx〉| for the initial negative peak (squares) and
the positive peak (circles) vs fp for the system shown in Fig. 14.
If we consider a system with fdc = 0,
it is still possible to obtain a nonzero dc response in either the
x or y-direction if the closed orbit of the ac drive
breaks an additional spatial symmetry.
For particles moving on periodic substrates,
it was previously shown that a rich variety of
phase locking and ratchet effects can occur when the ac drive is
noncircular [16,17].
Some of these effects include a number of current
reversals as the ac amplitude is increased [16].
In the case of a disordered substrate,
we find that it is still possible to
produce a ratchet effect and even reversals when fdc=0
and an acircular ac drive is applied;
however, the well defined phase locking steps seen for periodic
substrates are missing.
In Fig. 13 we show two examples of the closed orbits that a
particle would follow in the absence
of pinning or other particles.
Figure 13(a) illustrates a circular orbit which does not break
spatial symmetry.
With only a circular ac drive and no dc drive, the particles do not ratchet.
In Fig. 13(b) we show an orbit for
g(t)=Acos(6ωt)∧y+A[sin(4ωt)+sin(6ωt)]∧x,
with ω = 0.001.
Here the reflection symmetry across the y axis is broken.
In Fig. 14 we plot
〈Vx〉 vs A
for fdc = 0, n = 0.4, and varied fp for
the system with the ac drive shown in Fig. 13(b).
In Fig. 14(a) for low fp = 1.5, there is a
positive peak in 〈Vx〉, indicating
that a +x rectification is occurring even the absence of a dc drive.
At high A, 〈Vx〉
goes to zero and the system reorders into a moving crystal. For fp = 2.5
[Fig. 14(b)],
the positive peak in 〈Vx〉 is
larger and there is an additional negative
peak in 〈Vx〉
that occurs before the positive 〈Vx〉 peak. As
fp increases for
Fig. 14(c-f), the negative peak
in 〈Vx〉
grows in magnitude and
the locations of both peaks shift to higher values of A.
For the higher values of fp, there is an initial
pinned region where all the particles are trapped and
〈Vx〉 = 0.
As fp increases, this pinned region grows in width.
In Fig. 15 we plot the absolute value of
the maximum |〈Vx〉| for (squares) the initial
negative peak and (circles) the subsequent positive peak.
Here it can be seen that
there is a minimum pinning force of fp ≈ 0.9
required to produce any kind of ratcheting effect.
The positive peak initially grows in magnitude
and reaches a maximum value at fp ≈ 2.5.
As fp increases further, the maximum height of the
positive peak decreases; however,
the range of A over which a positive
ratchet effect occurs is also widened as seen in Fig. 14. The negative peak
first appears at a higher value of fp = 1.75 and increases monotonically
in size as fp is further increased.
Figure 16:
Ratchet effect in 〈Vy〉
(solid curve) and 〈Vx〉 (dashed curve) for the same system in
Fig. 14 with fp = 7.0.
We find that the ratchet effect for asymmetric ac drives
can occur in both the x and y
directions simultaneously.
In Fig. 16 we plot 〈Vx〉 (dashed curve) and
〈Vy〉
(solid curve) for the same system as in
Fig. 14 with fp = 7.0. Here, the same trend in
〈Vx〉 is seen with an initial pinned regime
followed by a strong negative peak and a reversal
to a positive peak at higher A.
For 〈Vy〉, we find a similar trend,
with an initial negative peak which begins at the
same value of A as the negative peak in 〈Vx〉. The negative
peak for 〈Vy〉 has a smaller magnitude than
the negative peak in
〈Vx〉. For higher A,
a much larger positive peak in
〈Vy〉 occurs near the value of A where
〈Vx〉
crosses zero. At very high A the ratchet effect in both
directions disappears.
These results show that it is possible to obtain a ratchet effect
for particles interacting
with random disorder where the symmetry breaking comes from
the ac drive alone. The
current reversals and the magnitude of the ratchet
effect persist for varied system size
and thus they are not artifacts caused by the system size.
Additionally, if we repeat the simulations
for different random pinning configurations,
the same types of curves are produced.
We have also tested a
number of different ac drives that break a reflection
symmetry. The details
of the curves are different; however, in general at
least one current reversal is observed in each case.
The ratchet effect in the absence of the dc drive is
consistent with the observations
in earlier studies of particles driven over periodic
disorder [16]. In the previous
study, crossed ac drives with characteristics similar
to those shown in Fig. 13(b) produced dc transport
in both the x and y directions.
In that system the ratcheting effect occurred in well defined
regimes.
Additionally, the ratchet effect showed a number of current reversals for
increasing ac amplitude; however, for low A,
most of the steps were in the negative direction, while
for higher A, most of the steps were in the positive direction.
This is consistent with the results obtained here for random
disorder where we find a general smearing of all the steps.
The ratchet effect in both the periodic and random disorder cases does
not occur for ac drives that do not break at least one reflection symmetry.
In summary, we have shown that for repulsively interacting particles
moving over a disordered substrate,
it is possible to obtain a transverse ratchet effect when a
circular ac drive is imposed over an additional dc drive.
In the absence of the circular ac drive the particles move
only in the direction of the dc drive.
When the circular ac drive is present, the particles
can have an additional dc drift velocity in the direction
transverse to the applied dc drive.
The average transverse velocity shows a peak as a function of
ac amplitude for fixed dc drive
or for fixed ac amplitude and increasing dc drive. At high ac or dc drives
the system reorders
to a moving crystal phase. This phase is distinct from a moving smectic, which
would occur if only a dc drive were applied.
In the reordered phase the transverse ratchet effect is lost. For fixed
dc drive and increasing ac drive we also observe what we term
an overshoot effect where the longitudinal
velocity is larger than the maximum possible value that could be produced
by the dc drive alone. This
overshoot effect arises due to a longitudinal ratchet effect
produced near the reordering transition where the
nonlinearity of the longitudinal velocity force response changes. We
analyze the transverse ratchet effect for a wide range of system parameters,
including disorder strength,
particle density, temperature, and ac frequency.
We also show that the ratchet effect is robust for increasing
system sizes. The transverse ratchet effect arises due to a symmetry
breaking by the chirality of the ac drive plus an additional symmetry
breaking by the dc drive.
If the crossed ac drives are more complicated, such that the closed orbits
themselves are asymmetric, then it is possible to obtain a ratchet
effect even in the absence of a dc drive.
Acknowledgments-We thank Z. Toroczkai and M.B. Hastings
for useful discussions.
This work was supported by the US DOE under Contract No. W-7405-ENG-36.
R.D. Astumian and M. Bier, Phys. Rev. Lett. 72,
1766 (1994);
R.D. Astumian, Science 276, 917 (1997);
F. Jülicher,
A. Ajdari, and J. Prost, Rev. Mod. Phys. 69, 1269 (1997).
C. Marquet, A. Buguin, L. Talini, and P. Silberzan,
Phys. Rev. Lett. 88, 168301 (2002);
S.H. Lee, K. Ladavac, M. Polin, and D.G. Grier,
ibid.94, 110601 (2005);
D. Babic and C. Bechinger,
ibid.94, 148303 (2005).
H. Linke, T.E. Humphrey, A. Lofgren, A.O. Sushkov, R. Newbury,
R.P. Taylor, and P. Omling, Science 286, 2314 (1999);
H. Linke, T.E. Humphrey, P.E. Lindelof, A. Lofgren, R. Newbury,
P. Omling, A.O. Sushkov, R.P. Taylor, and H. Xu,
Appl. Phys. A 75, 237 (2002).
J.E. Villegas, E.M. Gonzalez, M.P. Gonzalez, J.V. Anguita,
and J.L. Vicent, Phys. Rev. B 71, 024519 (2005);
J. Van de Vondel, C.C. de Souza Silva, B.Y. Zhu, M. Morelle,
and V.V. Moshchalkov, Phys. Rev. Lett. 94, 057003 (2005).
F. Falo, P.J. Martinez, J.J. Mazo, and S. Cilla,
Europhys. Lett. 45, 700 (1999);
E. Trias, J.J. Mazo, F. Falo, and T.P. Orlando,
Phys. Rev. E 61, 2257 (2000);
G. Carapella and G. Costabile, Phys. Rev. Lett. 87, 077002 (2001);
D.E. Shalóm and H. Pastoriza,
ibid.94, 177001 (2005).
J.B. Majer, J. Peguiron, M. Grifoni, M. Tusveld, and J.E. Mooij,
Phys. Rev. Lett. 90, 056802 (2003);
A.V. Ustinov, C. Coqui, A. Kemp, Y. Zolotaryuk,
and M. Salerno,
ibid.93, 087001 (2004).