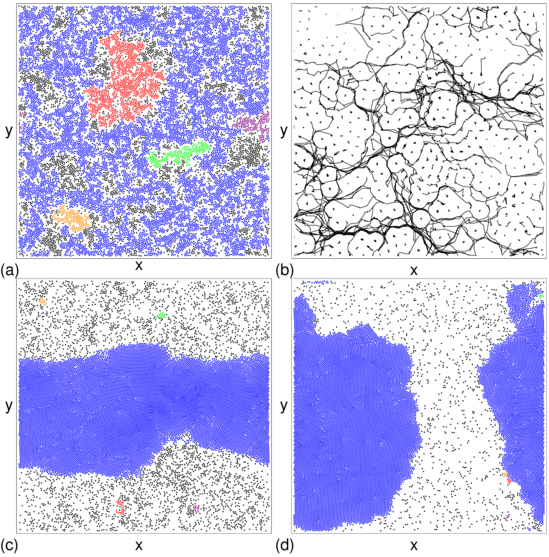
 Figure 1: Images of disk locations (dots) in a system with
ϕ = 0.55, rl = 300, N/Np = 2.0, and Fp = 5.0.
Disks are colored according to the cluster
to which they belong, with the largest cluster shown in blue, the second
largest in red, the third largest in green, the fourth largest in purple, and the
fifth largest in orange. All remaining clusters, including isolated disks,
are colored black. White areas contain no disks.
The disks are driven in the positive x direction with a driving force
of FD.
(a) At FD = 0.0, the system forms a uniform disordered state.
(b) Disk trajectories (lines) in a portion of the sample at FD = 0.5,
where the system is in a plastic flow state.
(c) At FD = 3.25, a dense stripe coexists with a pinned liquid.
The stripe structure is moving in the positive x direction.
(d) At FD = 6.0, a fully phase separated state appears with a large
cluster that translates in the positive x direction.
Figure 1: Images of disk locations (dots) in a system with
ϕ = 0.55, rl = 300, N/Np = 2.0, and Fp = 5.0.
Disks are colored according to the cluster
to which they belong, with the largest cluster shown in blue, the second
largest in red, the third largest in green, the fourth largest in purple, and the
fifth largest in orange. All remaining clusters, including isolated disks,
are colored black. White areas contain no disks.
The disks are driven in the positive x direction with a driving force
of FD.
(a) At FD = 0.0, the system forms a uniform disordered state.
(b) Disk trajectories (lines) in a portion of the sample at FD = 0.5,
where the system is in a plastic flow state.
(c) At FD = 3.25, a dense stripe coexists with a pinned liquid.
The stripe structure is moving in the positive x direction.
(d) At FD = 6.0, a fully phase separated state appears with a large
cluster that translates in the positive x direction.
|