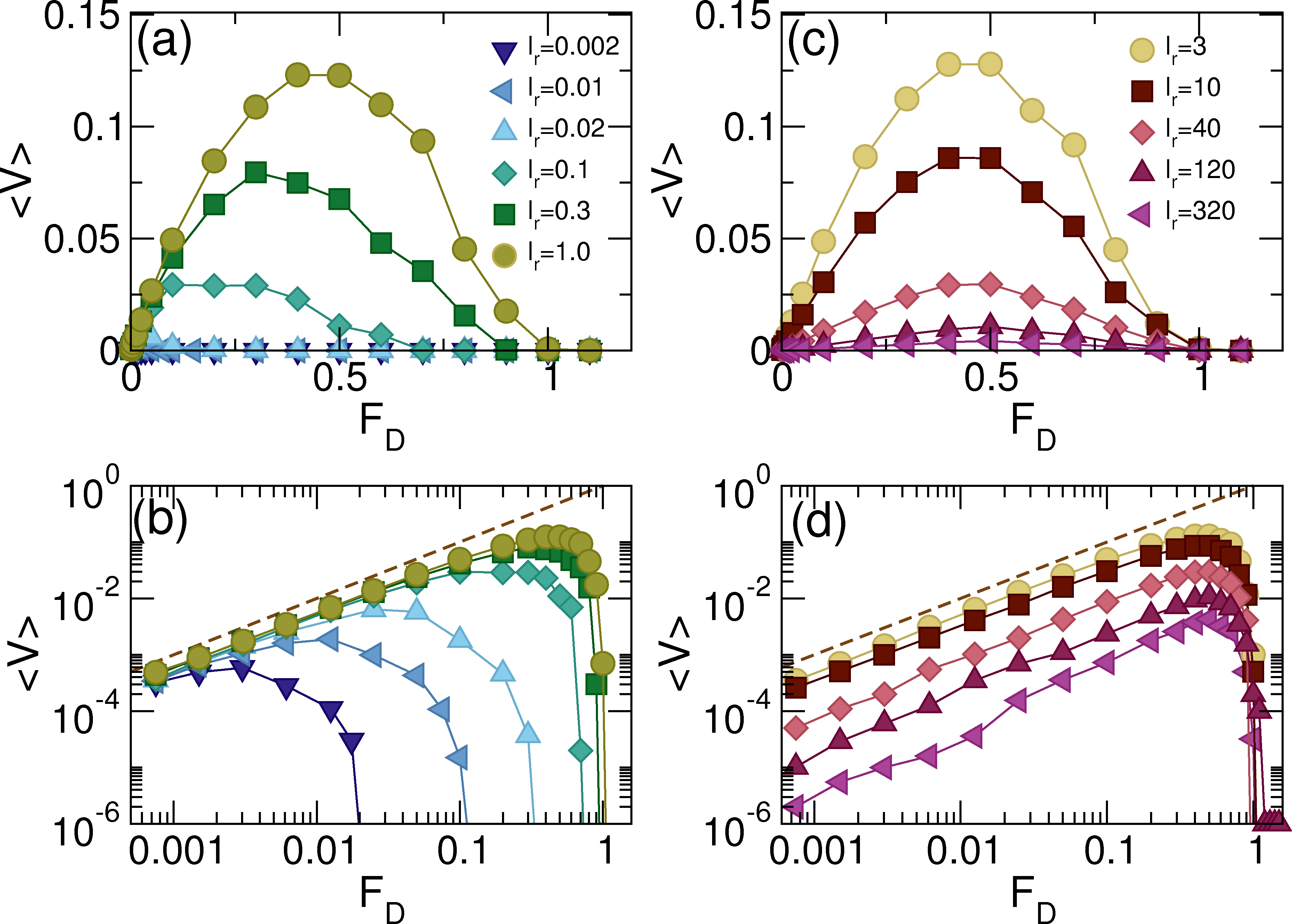
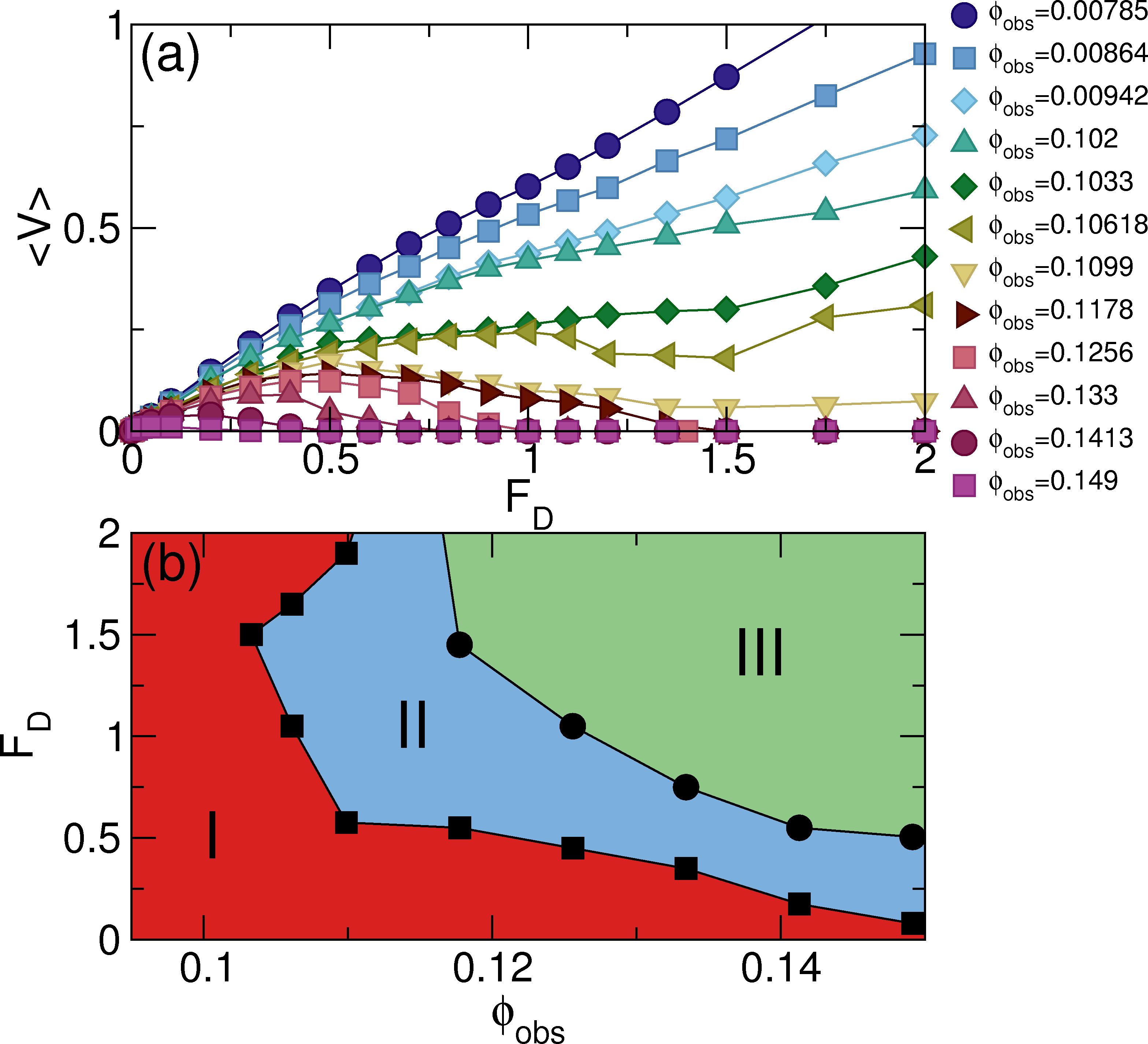
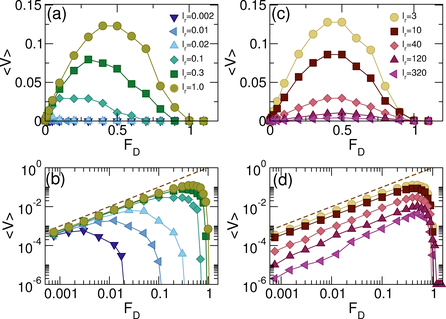
 Figure 4: 〈V〉 vs FD
in samples with ϕobs = 0.1257, Fm=0.5, and ϕa = 0.03146.
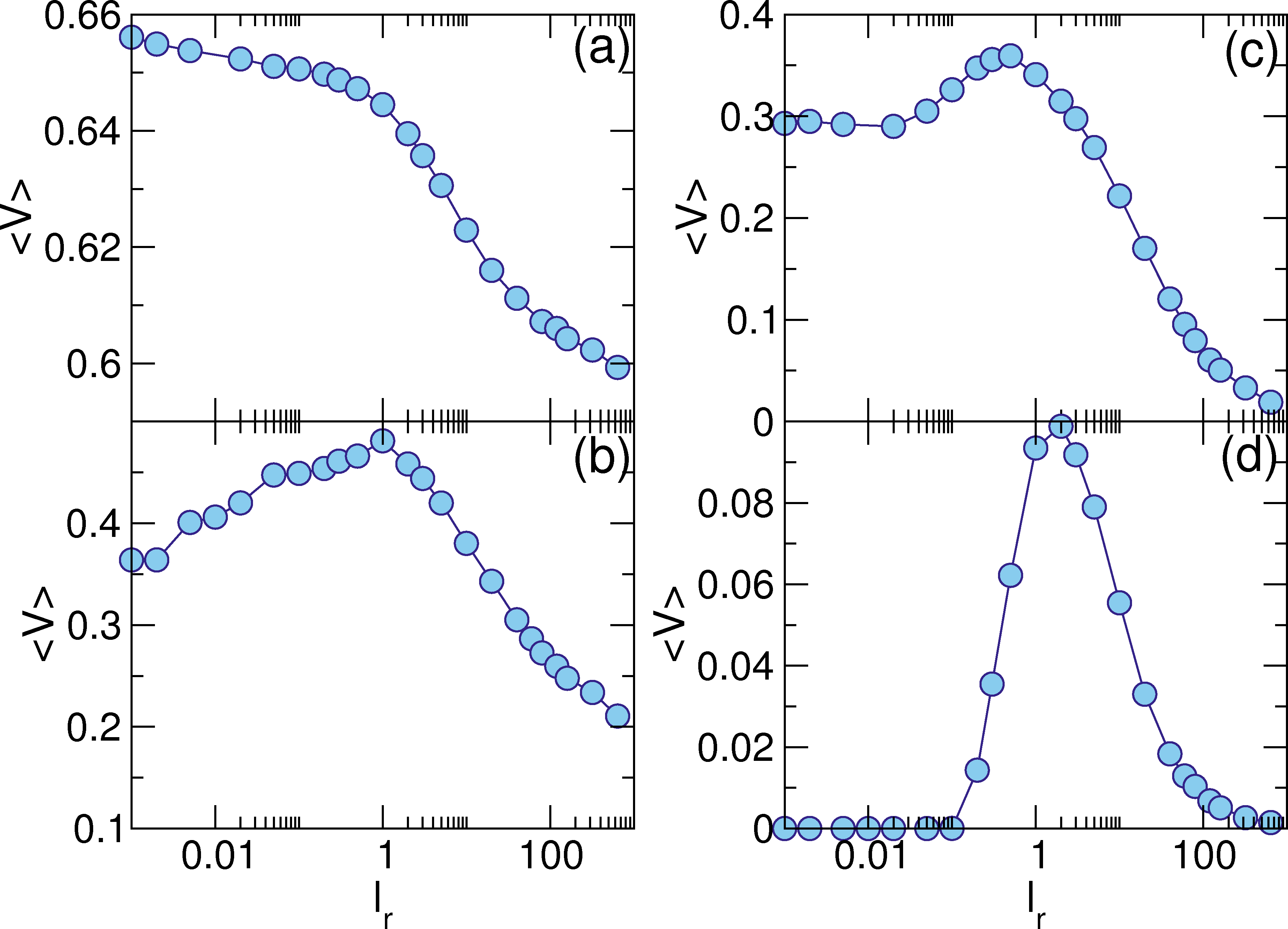
(a) The low activity regime where 〈V〉 increases with increasing lr
for
lr = 0.002
(dark blue down triangles),
0.01
(medium blue left triangles),
0.02
(light blue up triangles),
0.1
(teal diamonds),
0.3
(dark green squares),
and 1.0
(light green circles),
from bottom to top.
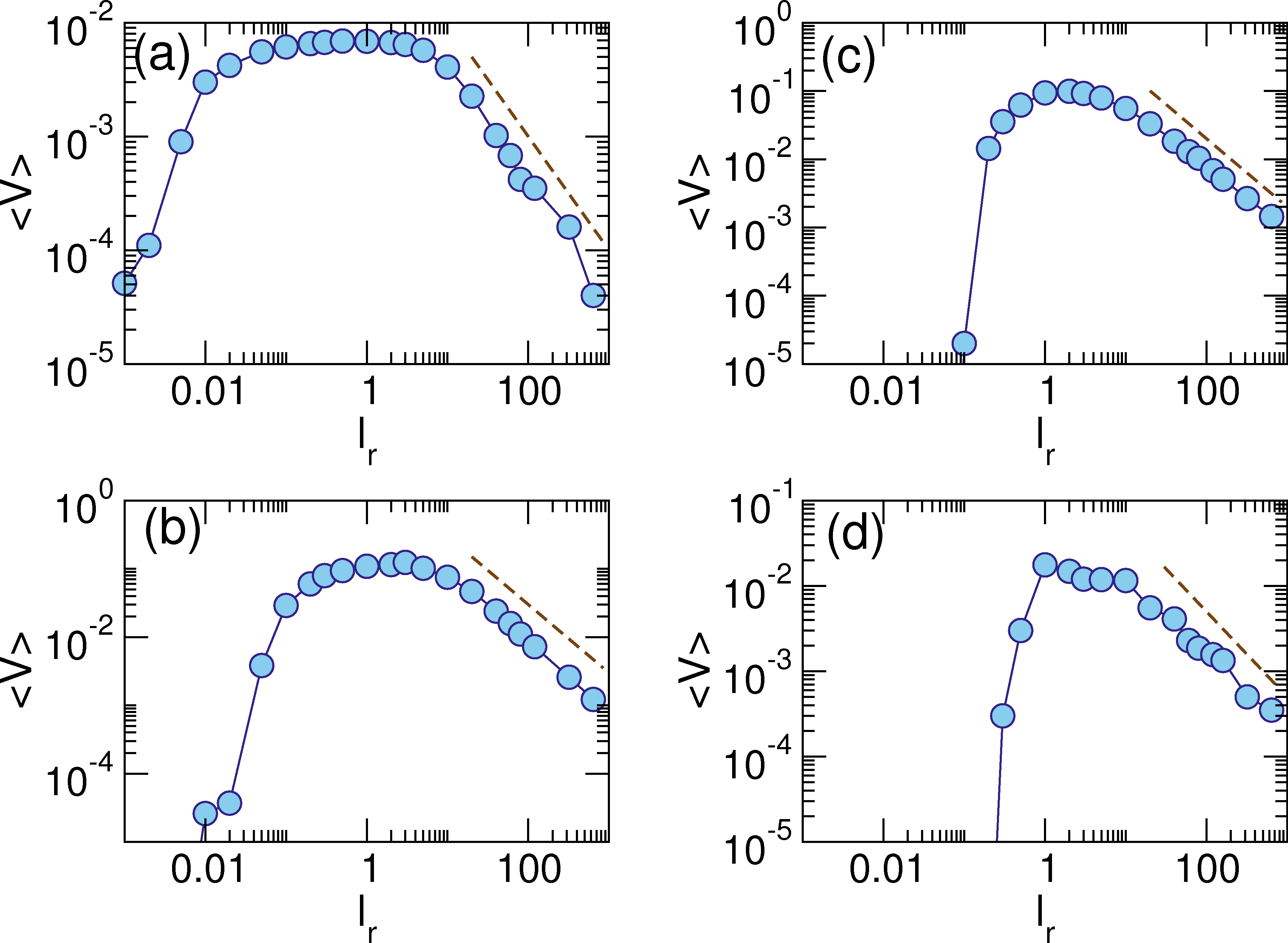
(b) The low activity regime curves from panel (a) plotted
on a log-log scale. The dashed line indicates
the
obstacle-free limit of 〈V〉 = FD.
Here 〈V〉 increases
with increasing lr.
(c) 〈V〉 vs FD for the same system in the high
activity regime where 〈V〉 deceases with increasing lr at
lr = 3
(yellow circles),
10
(dark red squares),
40
(light pink diamonds),
120
(dark pink up triangles),
and 320
(magenta triangles),
from top to bottom.
(d) The high activity curves from panel (a) plotted on a log-log scale.
The dashed line indicates the obstacle-free limit of
〈V〉 = FD. Here 〈V〉 decreases with
increasing lr.
Figure 4: 〈V〉 vs FD
in samples with ϕobs = 0.1257, Fm=0.5, and ϕa = 0.03146.
(a) The low activity regime where 〈V〉 increases with increasing lr
for
lr = 0.002
(dark blue down triangles),
0.01
(medium blue left triangles),
0.02
(light blue up triangles),
0.1
(teal diamonds),
0.3
(dark green squares),
and 1.0
(light green circles),
from bottom to top.
(b) The low activity regime curves from panel (a) plotted
on a log-log scale. The dashed line indicates
the
obstacle-free limit of 〈V〉 = FD.
Here 〈V〉 increases
with increasing lr.
(c) 〈V〉 vs FD for the same system in the high
activity regime where 〈V〉 deceases with increasing lr at
lr = 3
(yellow circles),
10
(dark red squares),
40
(light pink diamonds),
120
(dark pink up triangles),
and 320
(magenta triangles),
from top to bottom.
(d) The high activity curves from panel (a) plotted on a log-log scale.
The dashed line indicates the obstacle-free limit of
〈V〉 = FD. Here 〈V〉 decreases with
increasing lr.
|