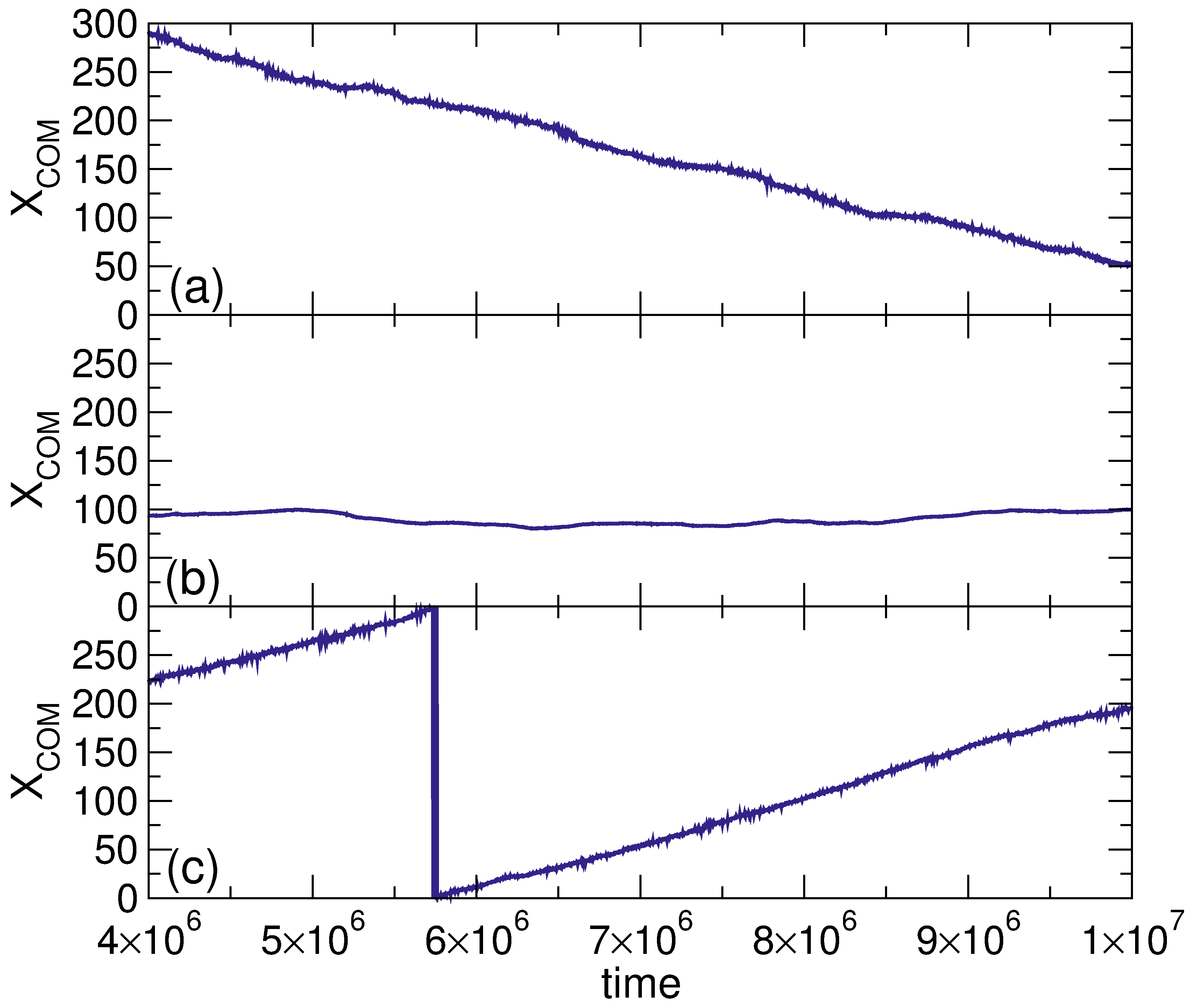
 Figure 9:
The center of mass XCOM location of a cluster vs
time in simulation time steps for a system with ϕ = 0.454 and rl = 300.
(a) At As = 1.25 and vw = 0.6, the cluster moves in the negative x-direction,
against the direction of the traveling wave.
(b) At As = 0.5 and vw = 4.0, the cluster
is stationary.
(c) At As = 3.0 and vw = 7.0, the cluster moves in the positive
x-direction, with the traveling wave.
The dip indicates the point at which the center of mass
passes through the periodic boundary conditions.
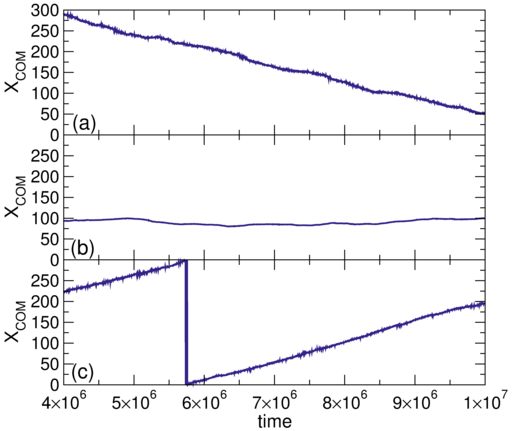
Figure 9:
The center of mass XCOM location of a cluster vs
time in simulation time steps for a system with ϕ = 0.454 and rl = 300.
(a) At As = 1.25 and vw = 0.6, the cluster moves in the negative x-direction,
against the direction of the traveling wave.
(b) At As = 0.5 and vw = 4.0, the cluster
is stationary.
(c) At As = 3.0 and vw = 7.0, the cluster moves in the positive
x-direction, with the traveling wave.
The dip indicates the point at which the center of mass
passes through the periodic boundary conditions.
|