Results
Model and its simulation.
Defect line motion.
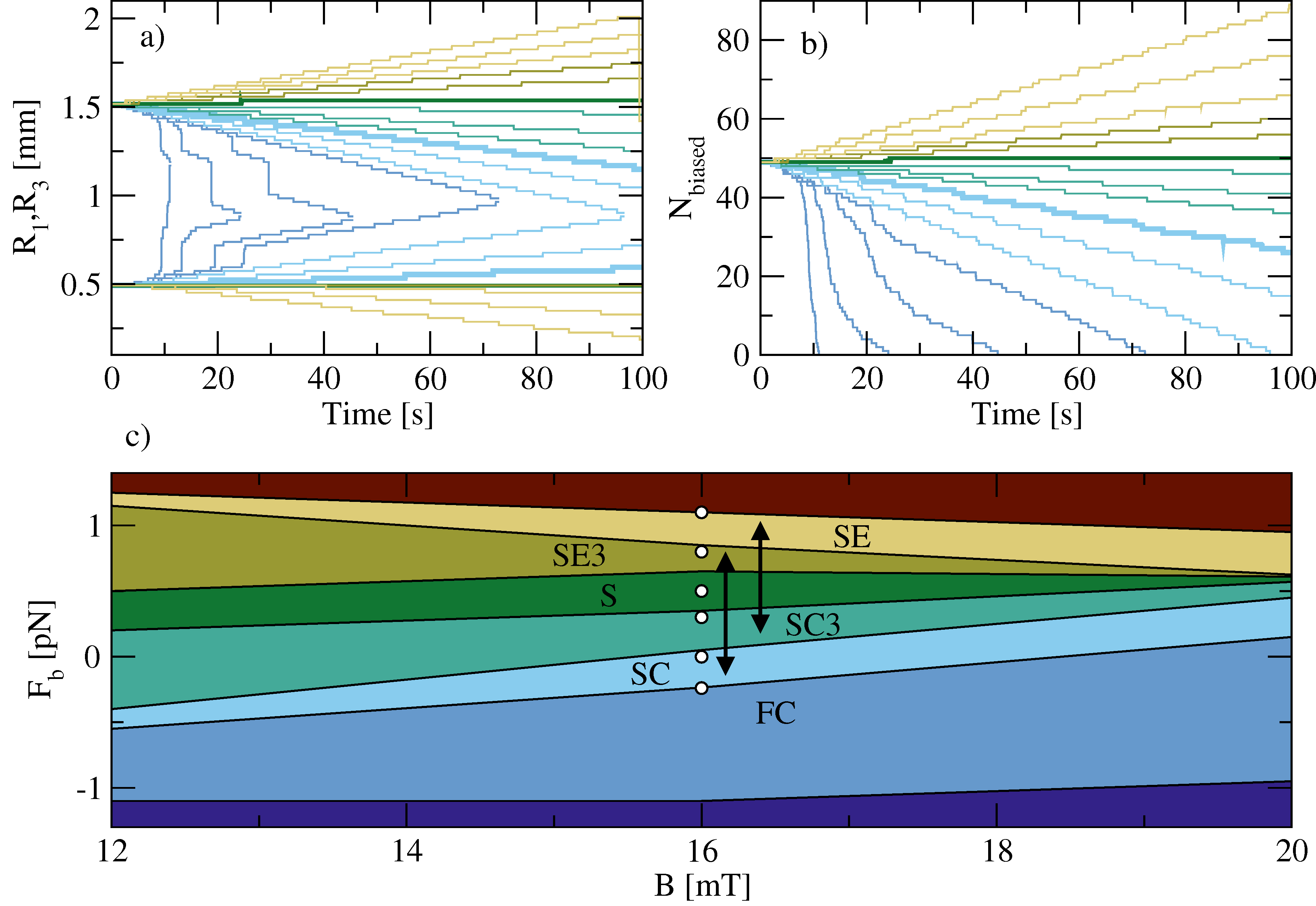
Effect of biasing force.
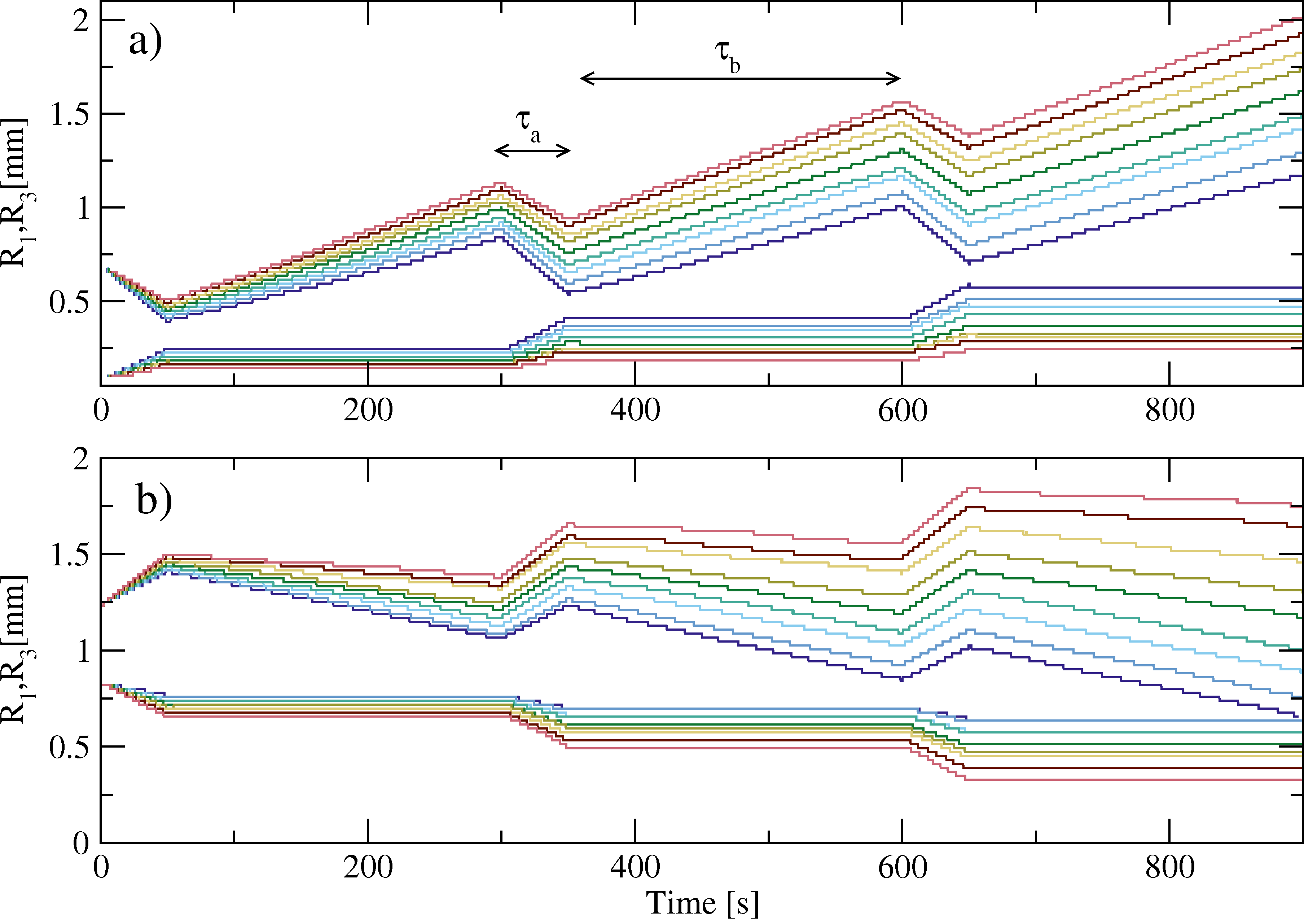
Ratchet motion undar an ac bias.
Discussion
Methods
Numerical simulation details.
References
Systems mimicking the behavior of spin ice have been studied experimentally and theoretically for nanomagnetic islands [1,2,3,4,5,6,7,8,9,10,11], superconducting vortices [12,13,14], and paramagnetic colloidal particles on photolithographically etched surfaces [15,13,16,17]. In each of these particle-based artificial ice systems, the collective lowest energy state is embedded into an ice-manifold where all vertices obey the "2-in/2-out" ice rule: two particles are close to each vertex and two are far from it. It is possible to write information into such a manifold by using an MFM tip [11] or an optical tweezer [15] to generate topological defects in the ground state arrangement of the spins. These defects consist of vertices that violate the ice rule and correspond to 3-in/1-out or 3-out/1-in configurations. In magnetic spin ices, such defects are called magnetic monopoles [18]. In colloidal artificial ice, the defects are not magnetically charged but they still carry a topological charge [19]. This implies that they can only appear in pairs separated by a line of polarized ice-rule vertices, and disappear by mutual annihilation. In a square ice geometry, such defect lines are themselves excitations and thus possess a tensile strength [20,21] that linearly confines the topological charges and can drive them to mutual annihilation, restoring the ground state configuration. In this paper we show how an additional biasing force can be used to stabilize, control, and move defect lines written on the ordered ground state of a square colloidal artificial spin ice system. To make contact with recent experimental realizations of this system [15,22], we employ a gravitational bias that can be implemented experimentally by tilting the effectively two-dimensional (2D) sample. We consider the interplay of two completely separate control parameters: the tilt that controls the biasing and the perpendicular magnetic field that controls the inter-particle repulsive magnetic forces, as in Ref. [15]. Adjusting these parameters gives us precise control over the energetics of the system and makes it possible to control the speed of the shrinking or expansion of a defect line. Then, using asymmetrical ac biasing forces and taking advantage of the different mobility of the 1-in and 3-in defects in colloidal ice, we show that the defect line can be made to ratchet, or undergo a net dc motion, in the direction of either of its ends. The control introduced by the biasing force permits locally stored, compact information to be written into the artificial ice metamaterial by a globally applied force, making it possible to create effective information storage since the write/read heads need to be situated only at the edge of the memory block. Also, by moving localized packets of information with a global force, it is possible to parallelize the information storage and retrieval procedures, increasing the speed in both cases.
Results

Model and its simulation
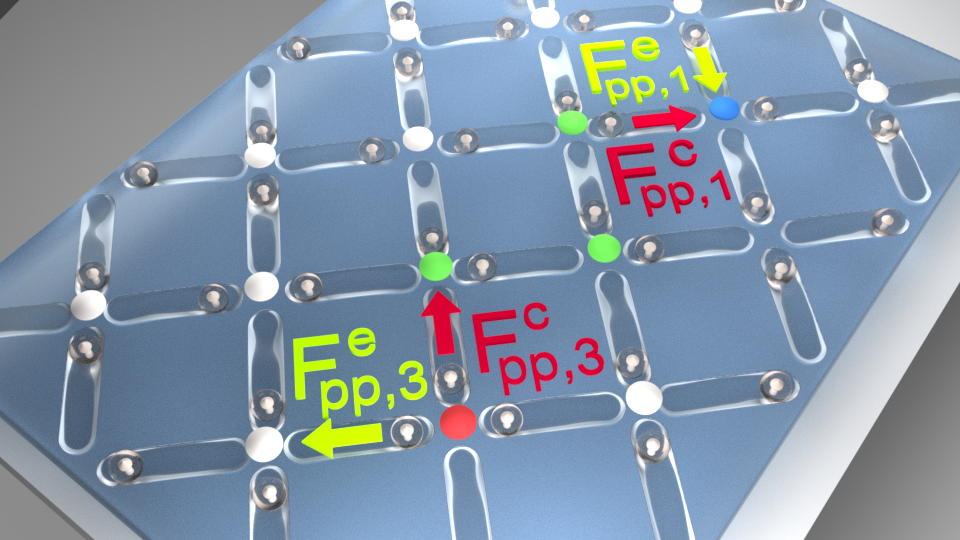
In Figure 1, we show schematics of our system illustrating the interplay between the interparticle and biasing forces. The four pinning sites in Figure 1(a) represent photolithographically etched grooves in the surface, each of which acts as a gravitational double well with a distance of d=10μm between the two minima. At the center of the pinning site is a barrier of height h=0.87 μm. Four paramagnetic colloidal particles are each trapped in the gravitational wells by the combination of their own apparent weight (W = (ρ− ρliquid) g V ) and the normal force from the wall, where ρ is the density and V is the volume of an individual particle, ρliquid is the density of the surrounding liquid, and g is the gravitational constant. A biasing force is introduced by tilting the whole ensemble by α degrees with respect to the horizontal. This creates a biasing force Wsin(α) equal to the tangential projection of the apparent weight of the particles, providing us with two independent external tuning parameters: the tilt of the surface and the external magnetic field. The direction of the external magnetic field →B is indicated by a light arrow in Figure 1(a). This field is always perpendicular to the sample plane, and it induces magnetization vectors →m ∝ →B parallel to itself in each of the paramagnetic particles. As a result, the particles repel each other with an isotropic force Fpp ∝ B2/r4 that acts in the plane. This favors arrangements in which the particles maximize their distance from each other. For an isolated vertex the lowest energy configuration is the 4-out arrangement shown in Figure 1(a); however, in a system of many coupled vertices, such an arrangement places an occupancy burden on the neighboring vertices. As a result, a multiple-vertex arrangement stabilizes in the low energy ice-rule obeying state illustrated in Figure 1(c) that is composed of 2-in and 2-out ground state vertices. The four vertex types we observe are shown in Figure 1(b), where the ground state vertex is colored gray, the biased ice-rule obeying vertex is green, the 1-in vertex is blue, and the 3-in vertex is red. The 1-in and 3-in monopole states carry an extra magnetic charge and serve as the starting and termination vertices for defect lines. It is also possible for 0-in [Figure 1(a)] and 4-in (not shown) vertices to form, but they are highly energetically unfavorable and do not play a role in our defect line study. For small bias (small α), the ground state vertex arrangement of Figure 1(c) is favored, while for large enough α, the system switches to the biased 2-in/2-out arrangement shown in Figure 1(d).Defect line motion.

|
Ratchet motion under an ac bias.
Discussion
We have shown that a defect line in a colloidal spin ice system contracts spontaneously at a rate which increases as the colloid-colloid interaction strength is increased. The line can be stabilized by the addition of a uniform global biasing force. It is possible to control the length and the position of the defect line by cycling this biasing force to create oscillations and defect movement through a ratchet effect. The ratcheting allows us to reposition defect line segments inside the sample to desired locations after nucleating them at the sample edge, making it possible to write information into the spin ice. If the uniform spin ice lattice were replaced by a specifically tailored landscape, it is possible to imagine the creation of logic gates and fan-out positions where defect lines can merge or split. Thus it could be possible to construct a device capable of storing and manipulating the information described by these defect lines through the creation of "defectronics" in spin ice that could be the focus of a future study building on defect line mobility and control in spin ices. Although we concentrate on magnetic colloidal particles, our results could also be applied to charge-stabilized colloidal systems with Yukawa interactions, for which it is possible to create large scale optical trapping arrays [23,24] and double-well traps [25], and where biasing could be introduced by means of an applied electric field [26]. Compared to atomic spin ices, our colloidal spin ice has relatively low density and, if it were used for information storage, would have relatively low write speeds. If the processes we model here can be introduced into a magnetic spin ice material, it would be possible to create a very high density information storage unit surpassing currently available densities by several orders of magnitude.Methods
Numerical simulation details.
Using Brownian dynamics, we simulate an experimentally feasible system [15] of paramagnetic colloids placed on an etched substrate of pinning sites. The spherical, monodisperse particles have a radius of R = 5.15μm, a volume of V = 572.15 μm3 and a density of ρ = 1.9 ×103 kg/m3. They are suspended in water, giving them a relative weight of W = 5.0515 pN. Gravity serves as a pinning force for the particles placed in the etched double-well pinning sites and also generates a uniform biasing force Fb = W sin(α) on all particles when the entire sample is tilted by α degrees. Typically, α ∼ 10°. The double well pinning sites [Figure 1(a)] representing the spins in the spin ice are etched into the substrate in the 2D square spin ice configuration [Figure 1(c,d)] with an interwell spacing of a=29μm. Each pinning site contains two minima that are d=10 μm apart. We place one particle in each pinning site, which can be achieved experimentally by using an optical tweezer to position individual particles. The pinning force Fs acting on the particle is represented by a spring that is linearly dependent on the distance from the minimum, so that Fs⊥ = 2kW ∆r⊥, where k=1.2 ×10−4 nm−1 is the spring constant, and ∆r⊥ is the perpendicular distance from the particle to the line connecting the two minima. When the particle is inside one of the minima, Fs|| = 2kW ∆r||, where ∆r|| is the distance from the particle to the closest minimum along the line connecting them, while when the particle is between the minima, Fs|| = 8h/d2 W ∆r||, where h=0.87 μm is the magnitude of the barrier separating the minima and ∆r|| is the distance between the particle and the barrier maximum parallel to the line connecting the two minima. During the simulation, the particles are always attached with these spring forces to their original pinning sites. The inter-particle repulsive interaction arises from the magnetization induced by the external magnetic field that is applied perpendicular to the pinning site plane. Each particle acquires a magnetization of m = B χV / μ0, where B is the magnetic field in the range of 0 to 30 mT, χ = 0.061 is the magnetic susceptibility of the particles, and μ0 = 4π×105pN/A2 is the magnetic permeability of vacuum. The repulsive force between particles is given by Fpp = 3 μ0 m2 / ( 2πr4 ) , and since it has a 1/r4 dependence in a 2D system we can safely cut it off at finite range. We choose a very conservative cutoff distance of rc = 60 μm to include next-nearest neighbor interactions (even though they are negligibly small). During the simulation we solve the discretized Brownian dynamics equation:
| (1) |
References
- [1]
- Wang, R. F. et al. Artificial `spin ice' in a geometrically frustrated lattice of nanoscale ferromagnetic islands. Nature 439, 303-306 (2006).
- [2]
- Möller G. & Moessner R. Artificial square ice and related dipolar nanoarrays. Phys. Rev. Lett. 96, 237202 (2006).
- [3]
- Qi, Y., Britlinger, T. & Cumings, J. Direct observation of the ice rule in an artificial kagome spin ice. Phys. Rev. B 77, 094418 (2008).
- [4]
- Ladak, S. et al. Direct observation of magnetic monopole defects in an artificial spin-ice system. Nature Phys. 6, 359-363 (2010).
- [5]
- Mengotti, E. et al. Real-space observation of emergent magnetic monopoles and associated Dirac strings in artificial kagome spin ice. Nature Phys. 7, 68-74 (2011).
- [6]
- Morgan, J. P., Stein, A., Langridge, S. & Marrows, C. H. Thermal ground-state ordering and elementary excitations in artificial magnetic square ice. Nature Phys. 7, 75-79 (2011).
- [7]
- Budrikis, Z. et al. Domain dynamics and fluctuations in artificial square ice at finite temperatures. New J. Phys. 14, 035014 (2012).
- [8]
- Nisoli, C., Moessner, R. & Schiffer P. Colloquium: Artificial spin ice: Designing and imaging magnetic frustration. Rev. Mod. Phys. 85, 1473-1490 (2013).
- [9]
- Kapaklis, V. et al. Thermal fluctuations in artificial spin ice. Nature Nanotechnol. 9, 514-519 (2014).
- [10]
- Gilbert, I. et al. Direct visualization of memory effects in artificial spin ice. Phys. Rev. B 92, 104417 (2015).
- [11]
- Wang, Y.-L. et al. Rewritable artificial magnetic charge ice. Science 352, 962-966 (2016).
- [12]
- Latimer, M. L., Berdiyorov, G. R., Xiao, Z. L., Peeters, F. M. & Kwok, W. K. Realization of artificial ice systems for magnetic vortices in a superconducting MoGe thin film with patterned nanostructures. Phys. Rev. Lett. 111, 067001 (2013).
- [13]
- Libál, A., Reichhardt, C. & Reichhardt, C. J. O. Realizing colloidal artificial ice on arrays of optical traps. Phys. Rev. Lett. 97, 228302 (2006).
- [14]
- Trastoy, J. et al. Freezing and thawing of artificial ice by thermal switching of geometric frustration in magnetic flux lattices. Nature Nanotechnol. 9, 710-715 (2014).
- [15]
- Ortiz-Ambriz, A. & Tierno, P. Engineering of frustration in colloidal artificial ices realized on microfeatured grooved lattices. Nature Commun. 7, 10575 (2016).
- [16]
- Libál, A., Reichhardt, C. & Reichhardt, C. J. O. Hysteresis and return-point memory in colloidal artificial spin ice systems. Phys. Rev. E 86, 021406 (2012).
- [17]
- Chern, G.-W., Reichhardt, C. & Reichhardt, C. J. O. Frustrated colloidal ordering and fully packed loops in arrays of optical traps. Phys. Rev. E 87, 062305 (2013).
- [18]
- Castelnovo, C., Moessner, R. & Sondhi, S. L. Magnetic monopoles in spin ice. Nature 451, 42-45 (2008).
- [19]
- Nisoli, C. Dumping topological charges on neighbors: ice manifolds for colloids and vortices. New J. Phys. 16, 113049 (2014).
- [20]
- Nascimento, F. S., Mól, L. A. S., Moura-Melo, A. R. & Pereira, A. R. From confinement to deconfinement of magnetic monopoles in artificial rectangular spin ices. New J. Phys. 14, 115019 (2012).
- [21]
- Vedmedenko, E. Y. Dynamics of bound monopoles in artificial spin ice: How to store energy in Dirac strings. Phys. Rev. Lett. 116, 077202 (2016).
- [22]
- Tierno, P. Geometric frustration of colloidal dimers on a honeycomb magnetic lattice. Phys. Rev. Lett. 116, 038303 (2016).
- [23]
- Dufresne E. R. & Grier D. G. Optical tweezer arrays and optical substrates created with diffractive optics. Rev. Sci. Instrum. 69, 1974-1977 (1998).
- [24]
- Brunner M. & Bechinger C. Phase behavior of colloidal molecular crystals on triangular light lattices. Phys. Rev. Lett. 88, 248302 (2002).
- [25]
- Babic, D., Schmitt, C. & Bechinger, C. Colloids as model systems for problems in statistical physics. Chaos 15, 026114 (2005).
- [26]
- Bohlein, T., Mikhael, J. & Bechinger C. Observation of kinks and antikinks in colloidal monolayers driven across ordered surfaces. Nature Mater. 11, 126-130 (2012).
-
Acknowledgements
- We thank P. Tierno, A. Ortiz, and J. Loehr for useful discussions and for providing realistic parameters with regards to the experimentally feasible realization of colloidal spin ice. We gratefully acknowledge the support of the U.S. Department of Energy through the LANL/LDRD program for this work. This work was carried out under the auspices of the NNSA of the U.S. DoE at LANL under Contract No.DE-AC52-06NA25396. Author contributions A.L. performed the numerical calculations. C.N. performed the analytical calculations. A.L., C.N., C.J.O.R., and C.R. contributed to analyzing the data and writing the paper.
Additional information
Competing financial interests: The authors declare no competing financial interests.File translated from TEX by TTHgold, version 4.00.
Back to Home