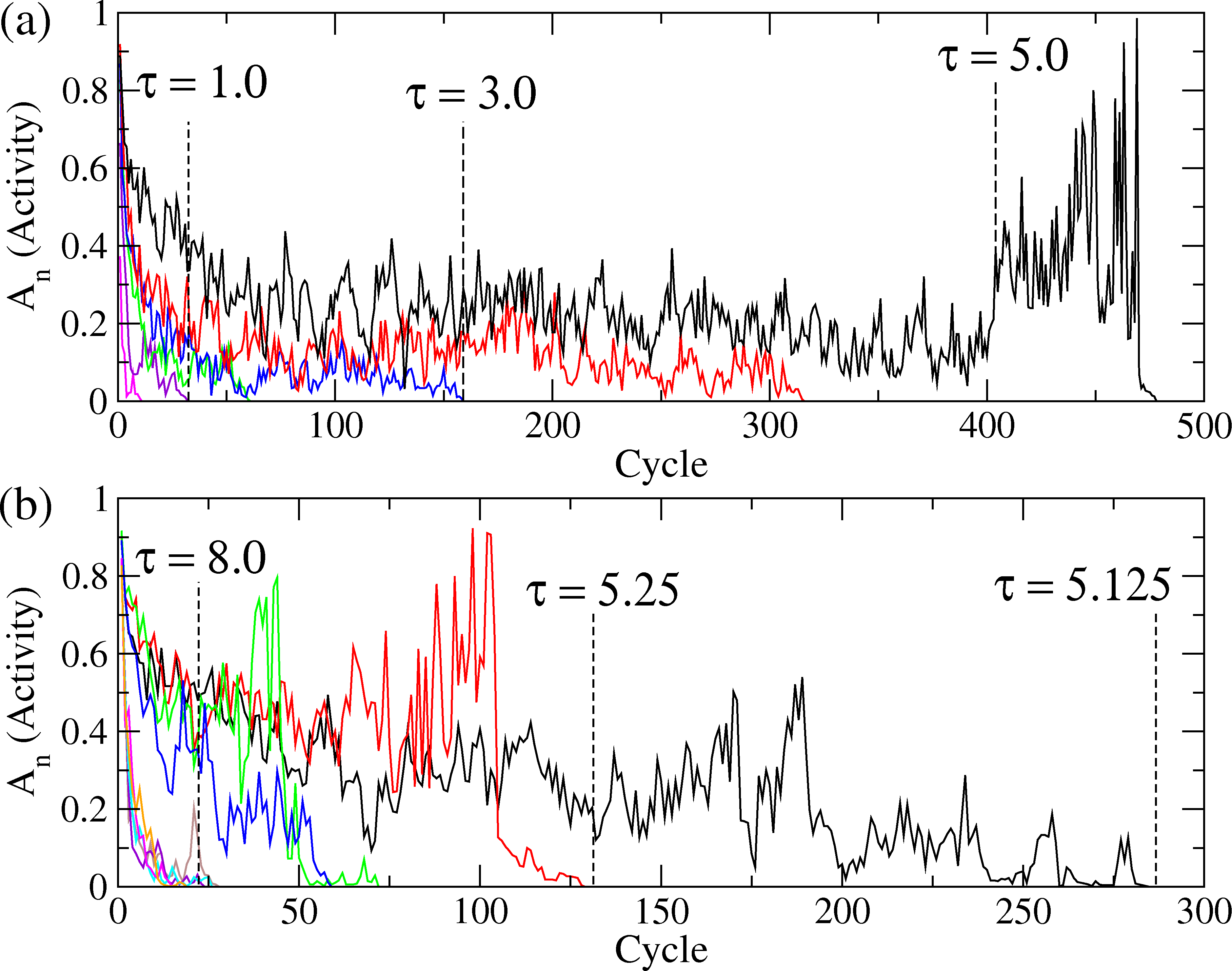
 Figure 1:
(a) The fraction of active dislocations An that do
not return to the same position after
n successive cycles of a periodic drive, plotted vs n.
When An = 0, the system is considered reversible.
From left to right,
the external drive τext = 0.5, 1.0, 2.0, 3.0, 4.0, and 5.0.
The τext = 1.0,
3.0 and 5.0 curves are highlighted to show that the transient times
increase with increasing τext.
(b) The same for τext = 5.125, 5.25, 5.5, 6.0, 8.0, and 9.0,
with the τext = 5.125, 5.25, and 8.0 curves marked
to show that the transient times are now decreasing
with increasing τext.
Figure 1:
(a) The fraction of active dislocations An that do
not return to the same position after
n successive cycles of a periodic drive, plotted vs n.
When An = 0, the system is considered reversible.
From left to right,
the external drive τext = 0.5, 1.0, 2.0, 3.0, 4.0, and 5.0.
The τext = 1.0,
3.0 and 5.0 curves are highlighted to show that the transient times
increase with increasing τext.
(b) The same for τext = 5.125, 5.25, 5.5, 6.0, 8.0, and 9.0,
with the τext = 5.125, 5.25, and 8.0 curves marked
to show that the transient times are now decreasing
with increasing τext.
|